
![]() We’re proud to announce that we’re partnering with our friends at RYOT News to support their efforts in immersive 360-degree reporting.
We’re proud to announce that we’re partnering with our friends at RYOT News to support their efforts in immersive 360-degree reporting.
RYOT has been leading the charge into immersive journalism as they use virtual reality to promote awareness and action across the globe. Some of the key issues and events they’ve shed light on via 360 video include Nepal’s devastating earthquake, wild dolphin conservation, the Syrian refugee crisis and climate change in China.
RYOT News 360 Video Reel
Climate Change Spotlight in China
In December, RYOT collaborated with the Sierra Club to document China’s climate change issues in 360-degree virtual reality. Narrated by Cher, the piece covers the negative impact industrialization and big business has had on China’s environment and its population.
RYOT News Dolphin VR PSA
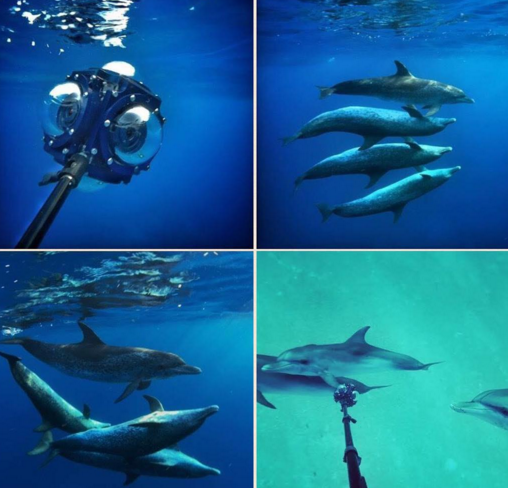
One of RYOT’s early 360-degree VR experiences came in the form of a virtual reality PSA to raise awareness for the humane treatment of dolphins. Filmed with our 360Abyss underwater 360 video gear, the project offers viewers an immersive look at wild dolphins in their natural habitat.
Produced in conjunction with Ric O’Barry’s Dolphin Project, the PSA takes us on a virtual dive and seeks to end harmful dolphin captivity. This project exemplifies VR’s potential as a tool for promoting conservation and environmental awareness.
While this is just a small sample of RYOT’s work, it serves as a window into the way in which they leverage VR to create impactful content that goes beyond traditional forms of news media. We’re proud to support RYOT in this endeavor as they keep pushing the boundaries of immersive journalism.
To see the latest VR content from RYOT, check out http://ryot.huffingtonpost.com/ or subscribe to their YouTube channel.
You must be logged in to post a comment.